
In 2013, Elon Musk published a paper titled "Hyperloop Alpha" about a futuristic transportation system consisting of high speed (800+ mph) pods traveling effortlessly through depressurized (1/100 atmosphere) tubes. Such a system would consume much less energy-per-passenger-per-journey over a certain distance range. From Los Angeles to San Francisco, this figure in megajoules is about 800 for a car journey, 1000 for an airplane journey and 50 for a hyperloop journey. This, coupled with faster travel time due to there being no speed limit set by aerodynamic drag makes hyperloop a very attractive system.
In April of 2016, I found out about the team of students at Northeastern making a hyperloop pod for SpaceX's competition and promptly joined. The team had been collaborating with five other schools - Memorial University of Newfoundland, Harvey Mudd College, University of Michigan, Cornell, and Princeton - to build a pod. Each of the schools was responsible for one subsystem, which presented somewhat of a logistical challenge, being spread out across a continent. In the coming few months, I familiarized myself with the design that the team brought to the design competition held in January and began manufacturing many of the suspension components, learning conventional machining practices from a shop mentor on the way.






In early July, the first "integration weekend" of many took place. MUN students shipped us the air supply system they had developed, and flew in to Boston to integrate their system onto the newly arrived welded aluminum frame from Rhinestahl AMG while Northeastern students completed final assembly of the air skates and wheels and then integrated them as well.



A few weeks after integration weekend 1, the pod was shipped to University of Michigan for them to integrate the carbon fiber fuselage and complete extensive air supply and suspension testing. The following month, I went to Michigan with some fellow Northeastern students and we began aligning the suspension (wheels, skates and e-brakes) to the track and each other.



After the first weekend in Michigan, it became clear that the suspension alignment needed some serious thought, as assumptions about manufacturing and material properties came back to bite us. Additionally, the controls team from Harvey Mudd began handing off their system to Northeastern, towards which I put significant systems engineering effort.






At the end of October, it came time to ship the pod off to SpaceX for testing weekend. This was an event reserved for all of the teams to come and test their pods and demonstrate their safety on SpaceX's open-air test track. We delivered a safety presentation to SpaceX engineers, had a design review with them, and got to meet some of the competing teams, including MIT and TU Delft.




Following testing weekend, the pod was shipped back to Boston for additional testing and a control system overhaul.



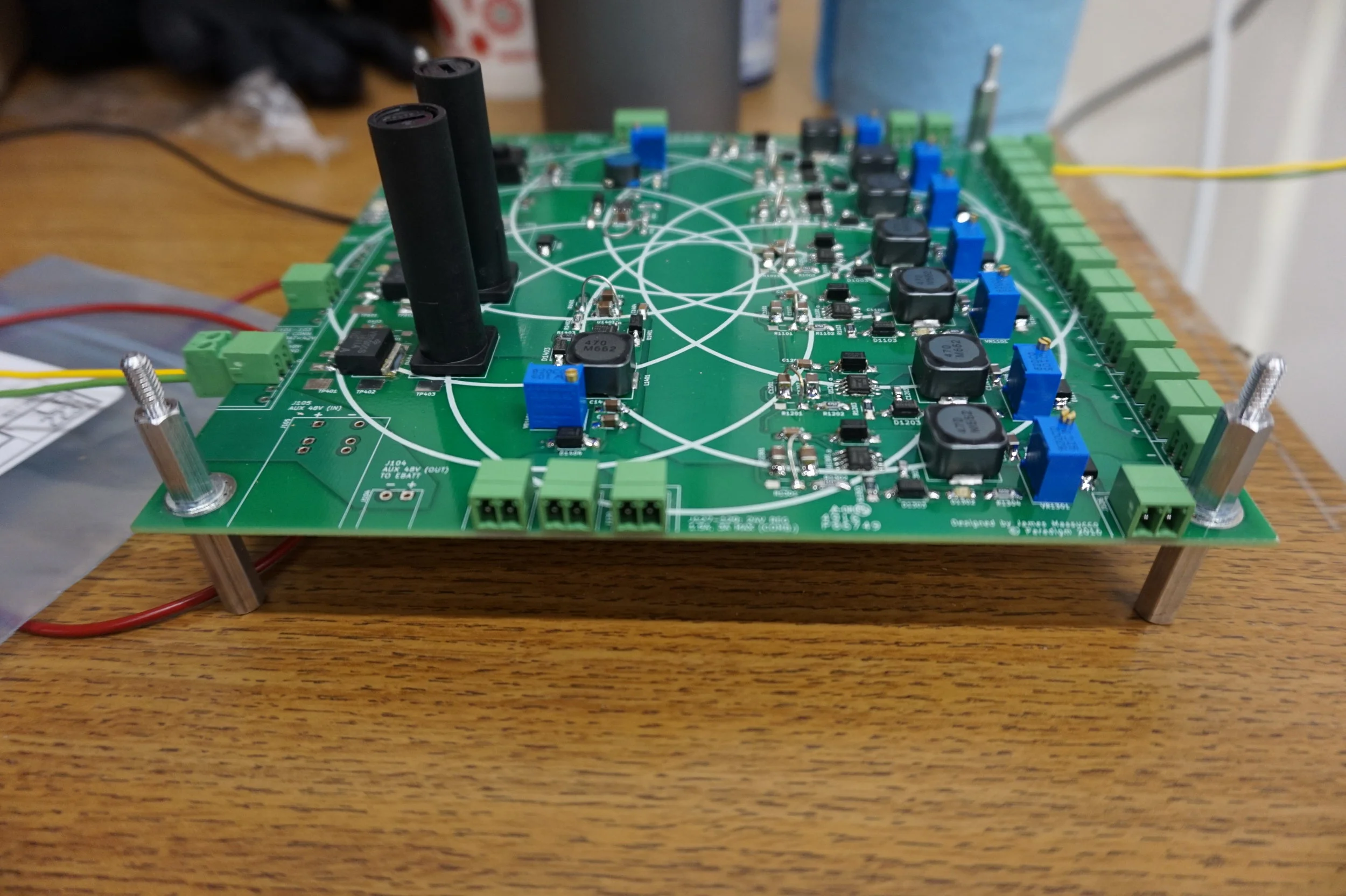
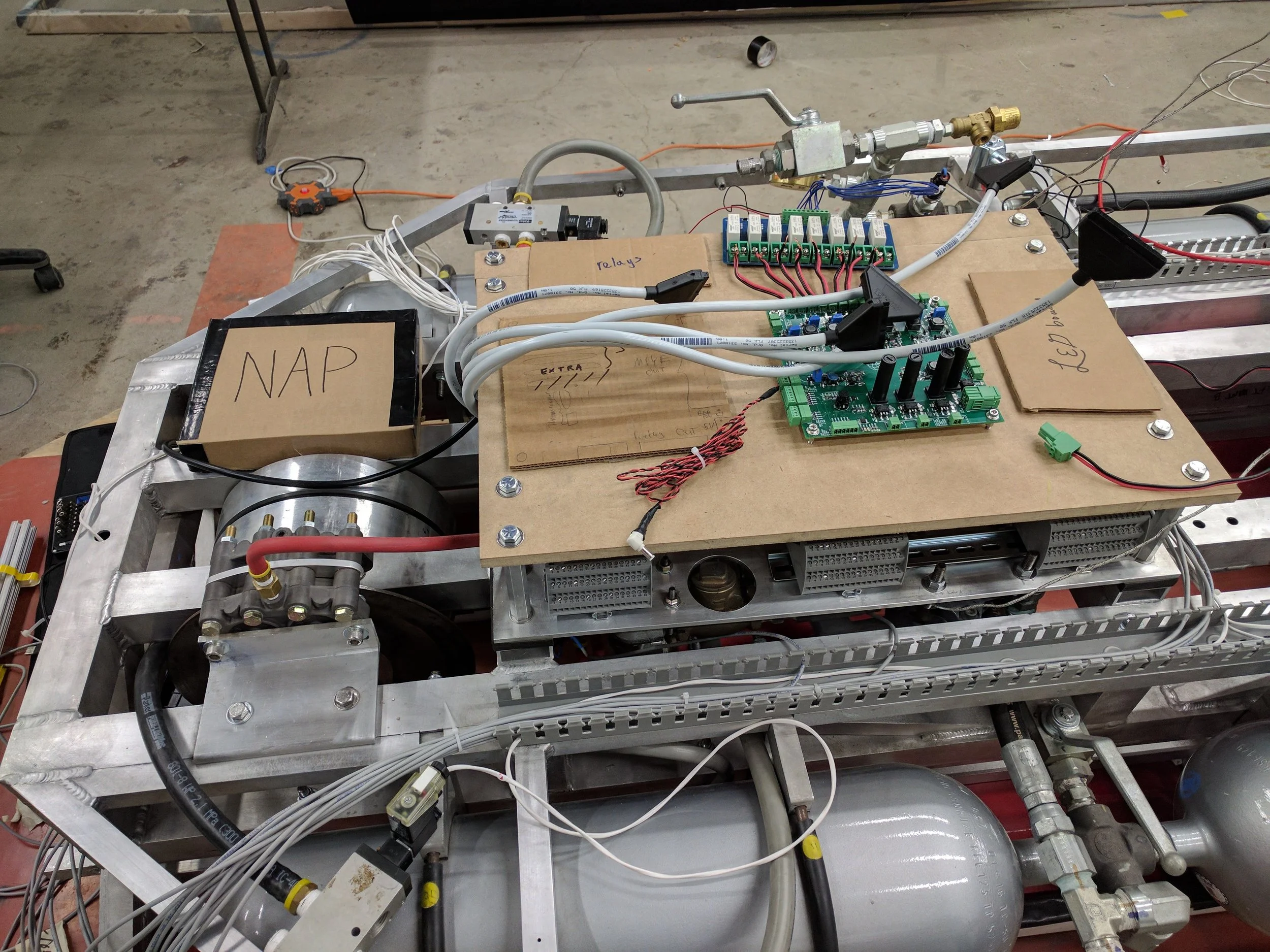
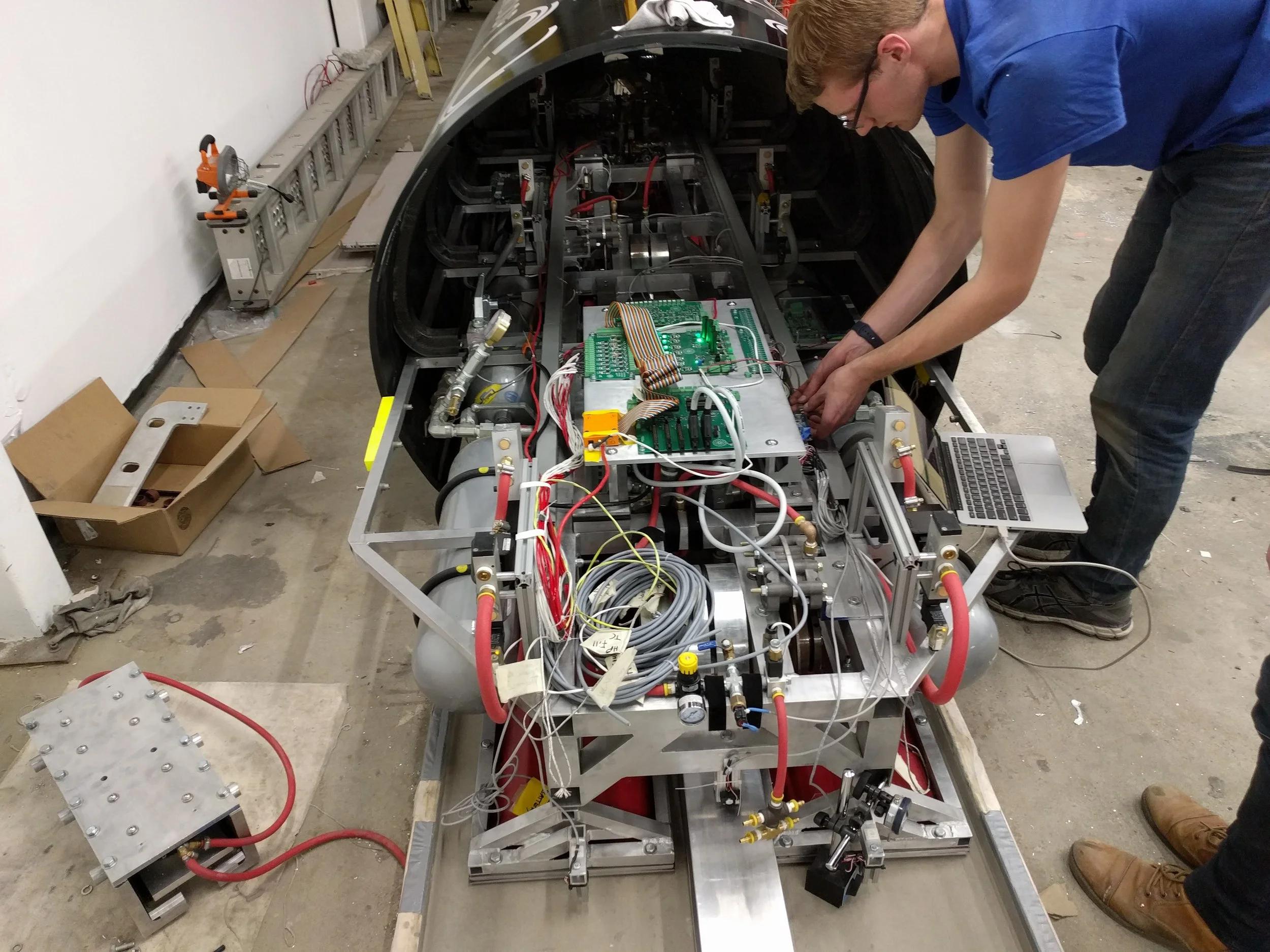
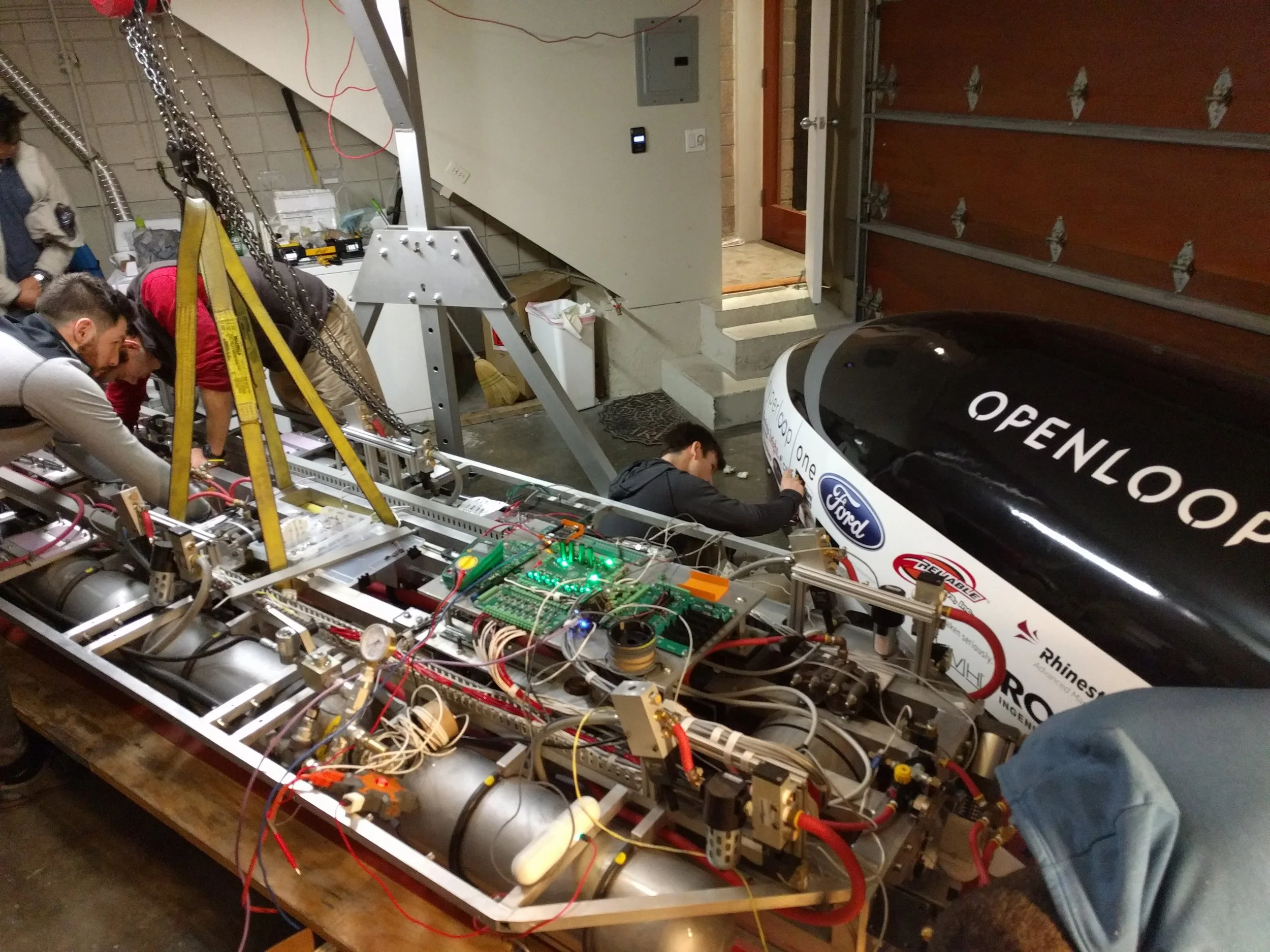
We recruited a few electrical engineers, of which the team was lacking previously, who I worked with to bring up to speed on the existing system, and then draft and create a new electrical/controls architecture incorporating various custom fabricated circuitboards.
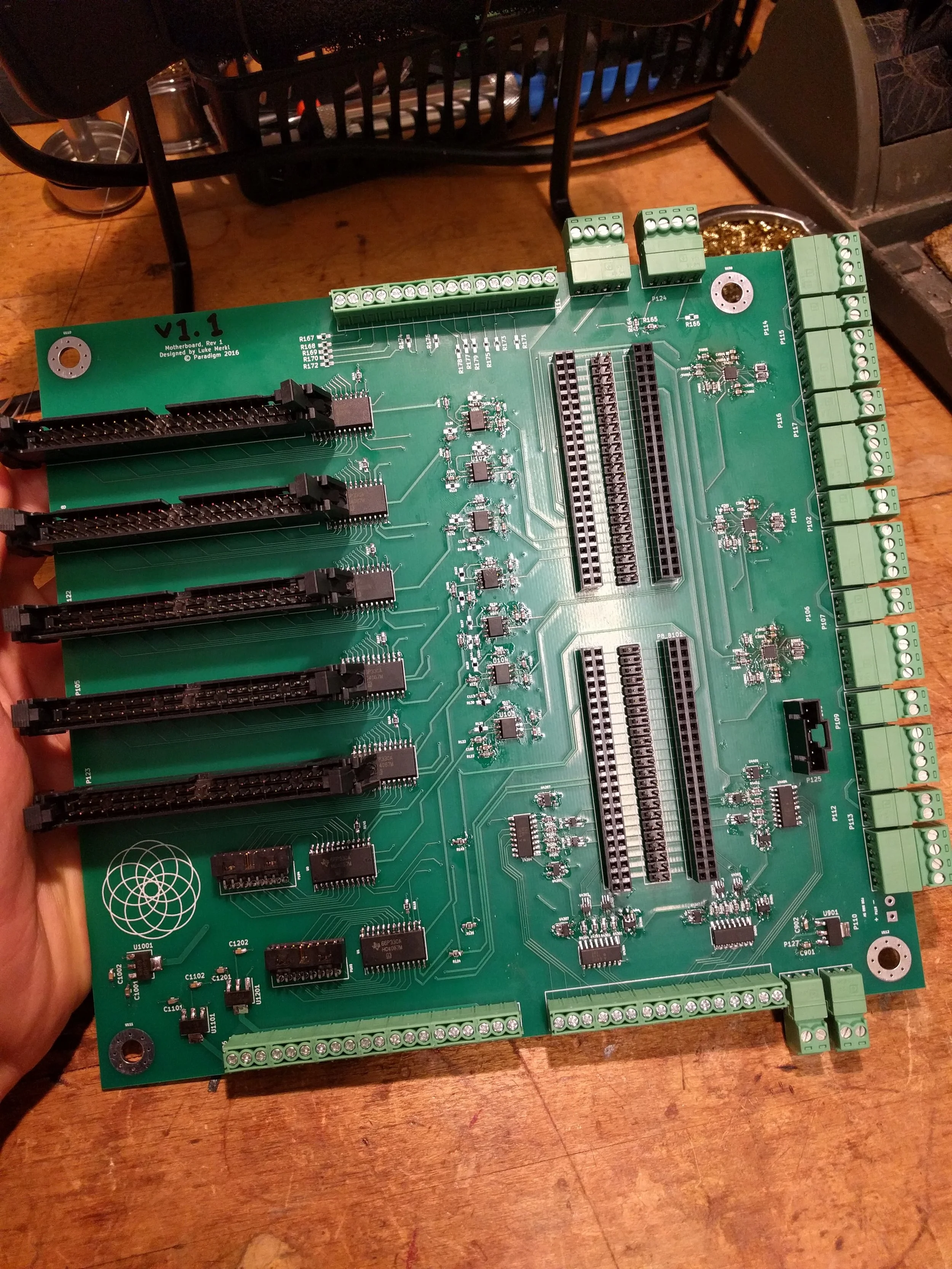
One of the main design improvements was the addition of "interface modules", an array of terminal blocks which all of the sensors on the pod connect to, and are then routed through big ribbon cables to the pod's "motherboard", which multiplexes the dozens of sensor inputs and filters their signals, as well as providing an interface for the central processor to control solenoid and proportional valves on the pod.
Abbess Instruments provided us access to their vacuum chambers, so we were able to test all of our core electronics for compatibility and thermal properties.


We shipped the pod back to California for Competition I at SpaceX, where we passed all of the safety/controls/vacuum/dynamic tests to get into the hypertube, but unfortunately didn't get a chance to do a run due to limited time and scheduling issues.





Click here for info on Competition II