



1
2
3
4
5
6
7
8
9
10
11
12
13
Computer Aided Design
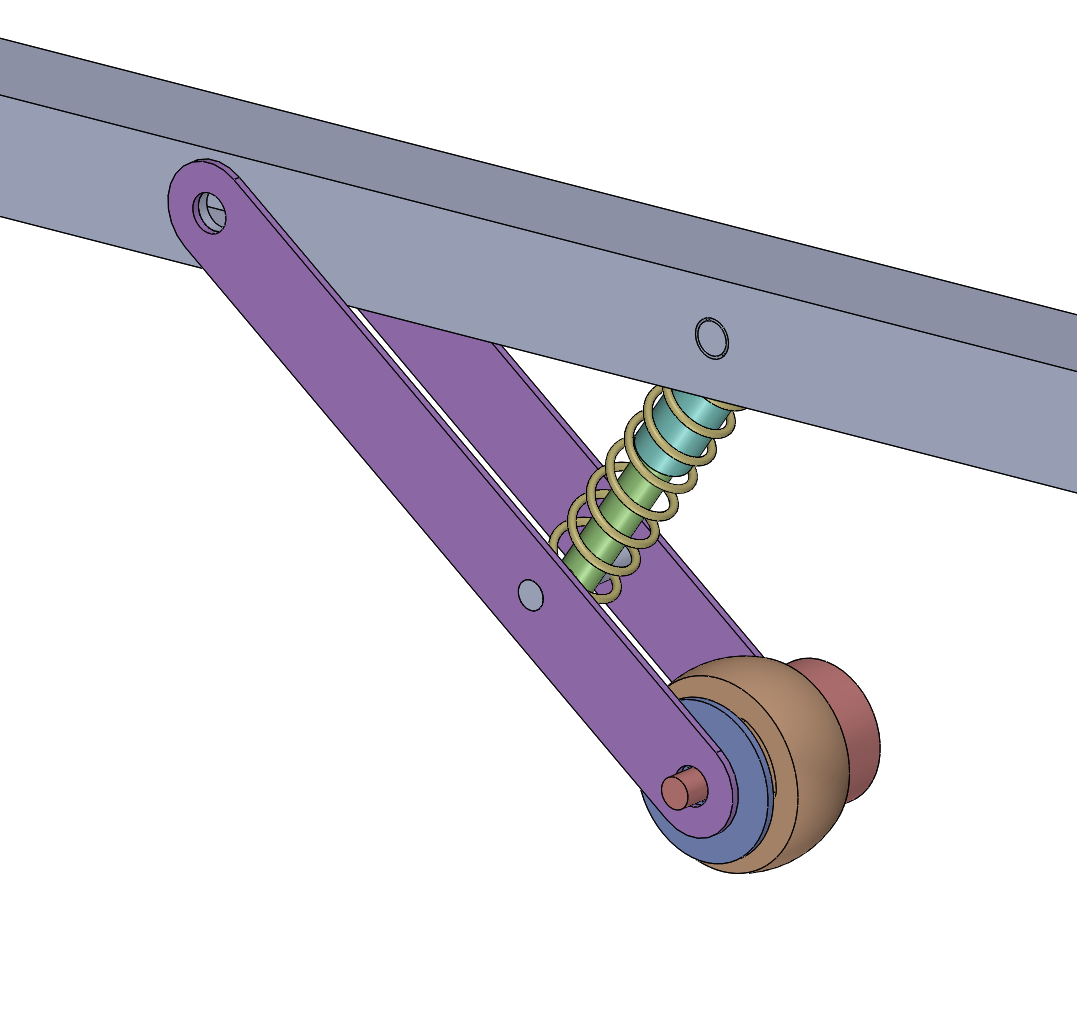
Landing gear design
Preliminary landing gear design for hyperloop pod
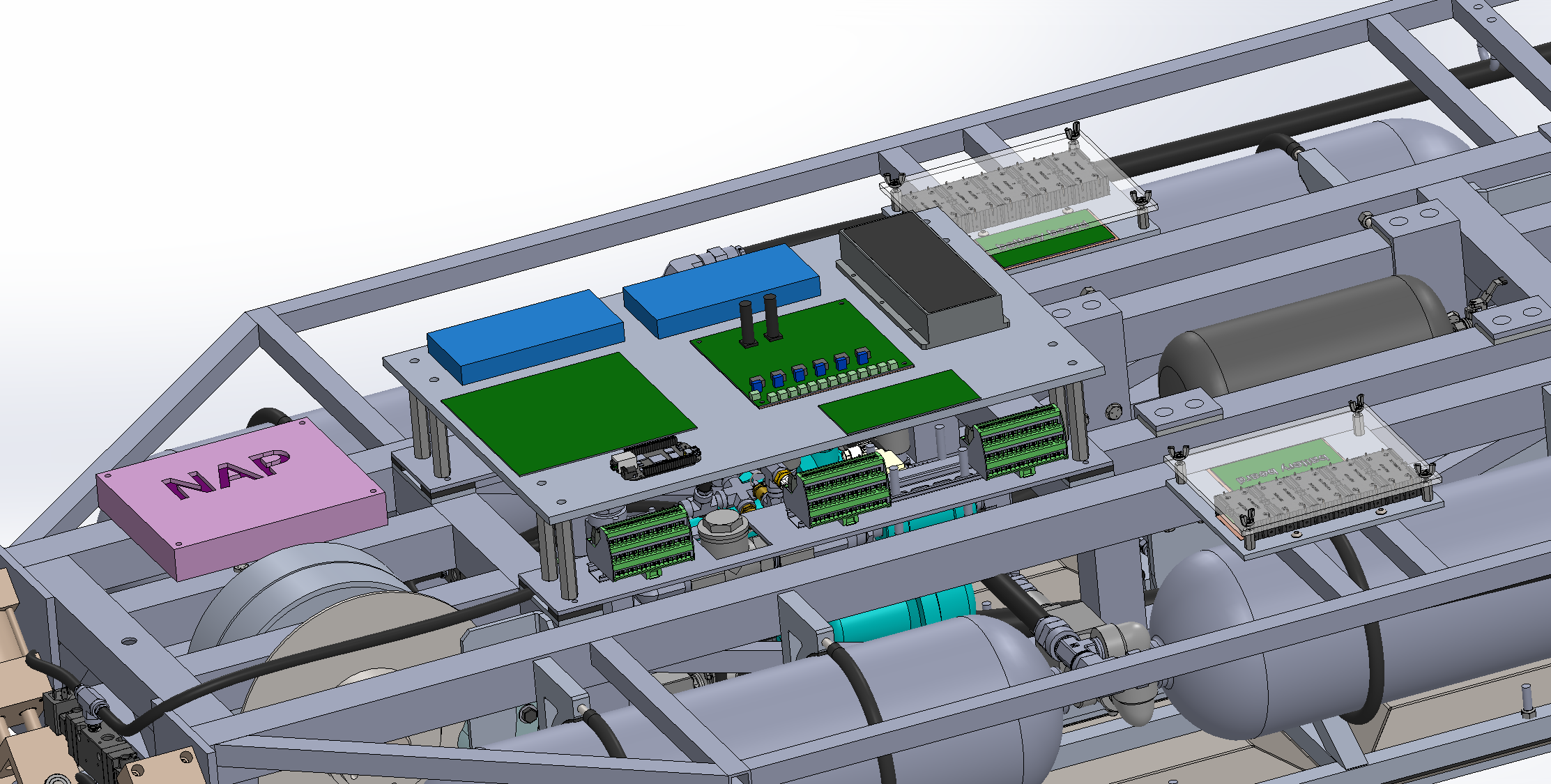
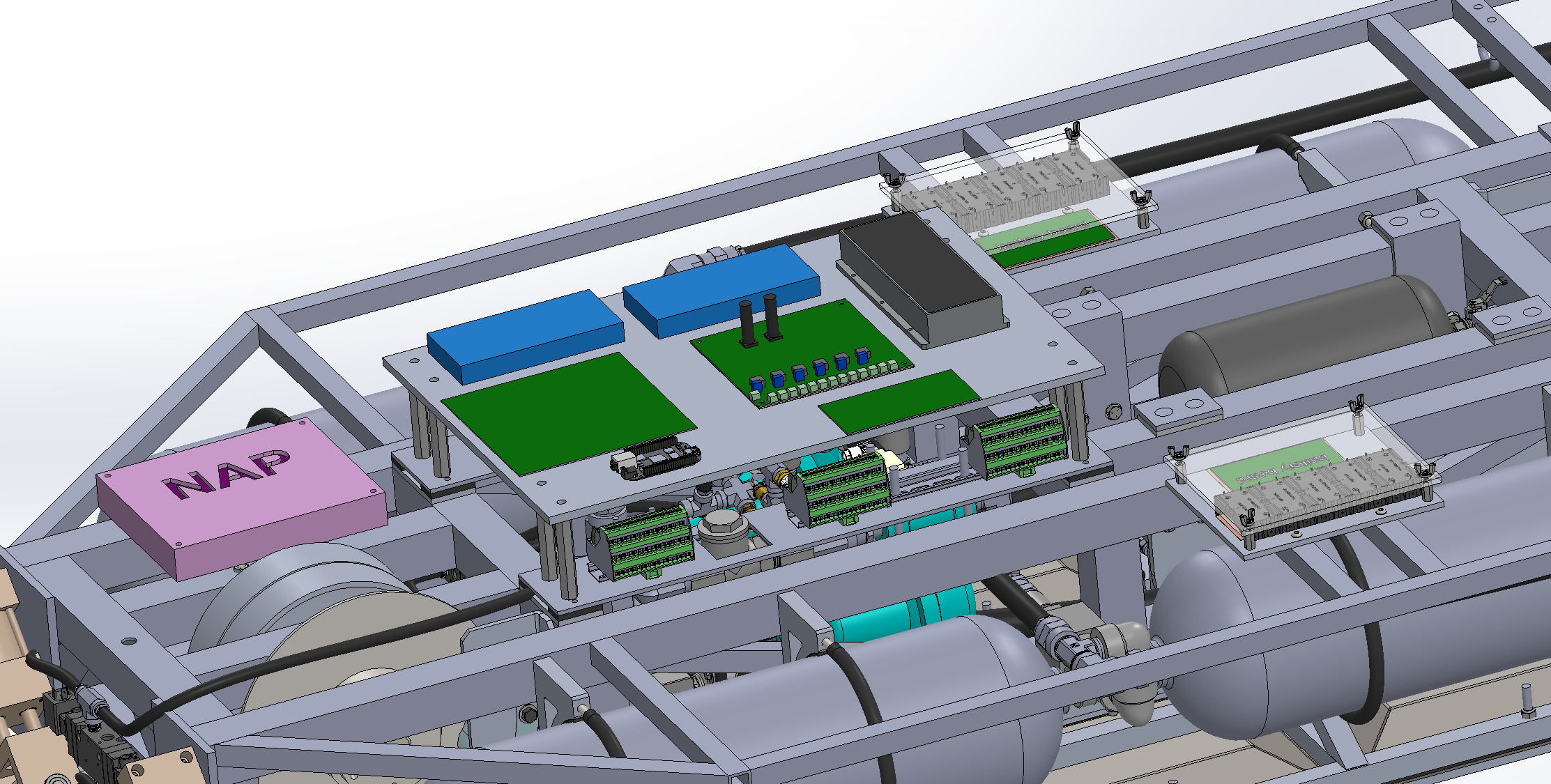
Main Electronics Panel (MEP)
The panel at the front of the pod where all the wires converge to be routed to their respective interfaces
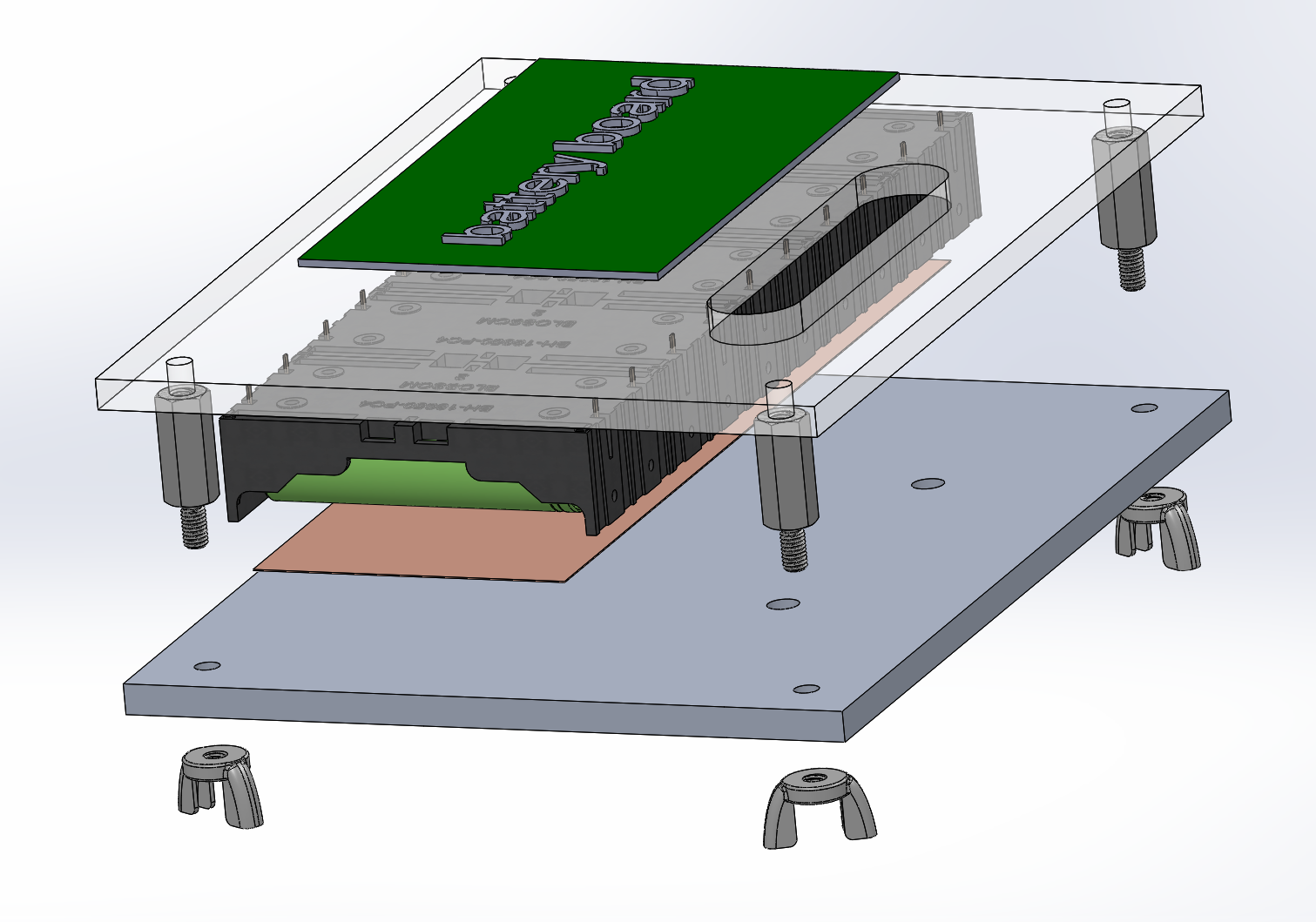
Battery pack design
Intermediary iteration of battery pack design for hyperloop pod
Keepout zone assessment
Assessment of the pod interfering with the SpaceX-sanctioned "keepout zones" inside of the hypertube
Distance sensor mounting bracket
Drawing of a weird bracket for a high-precision distance sensor used to measure hyperloop pod levitation height to ±10 micron
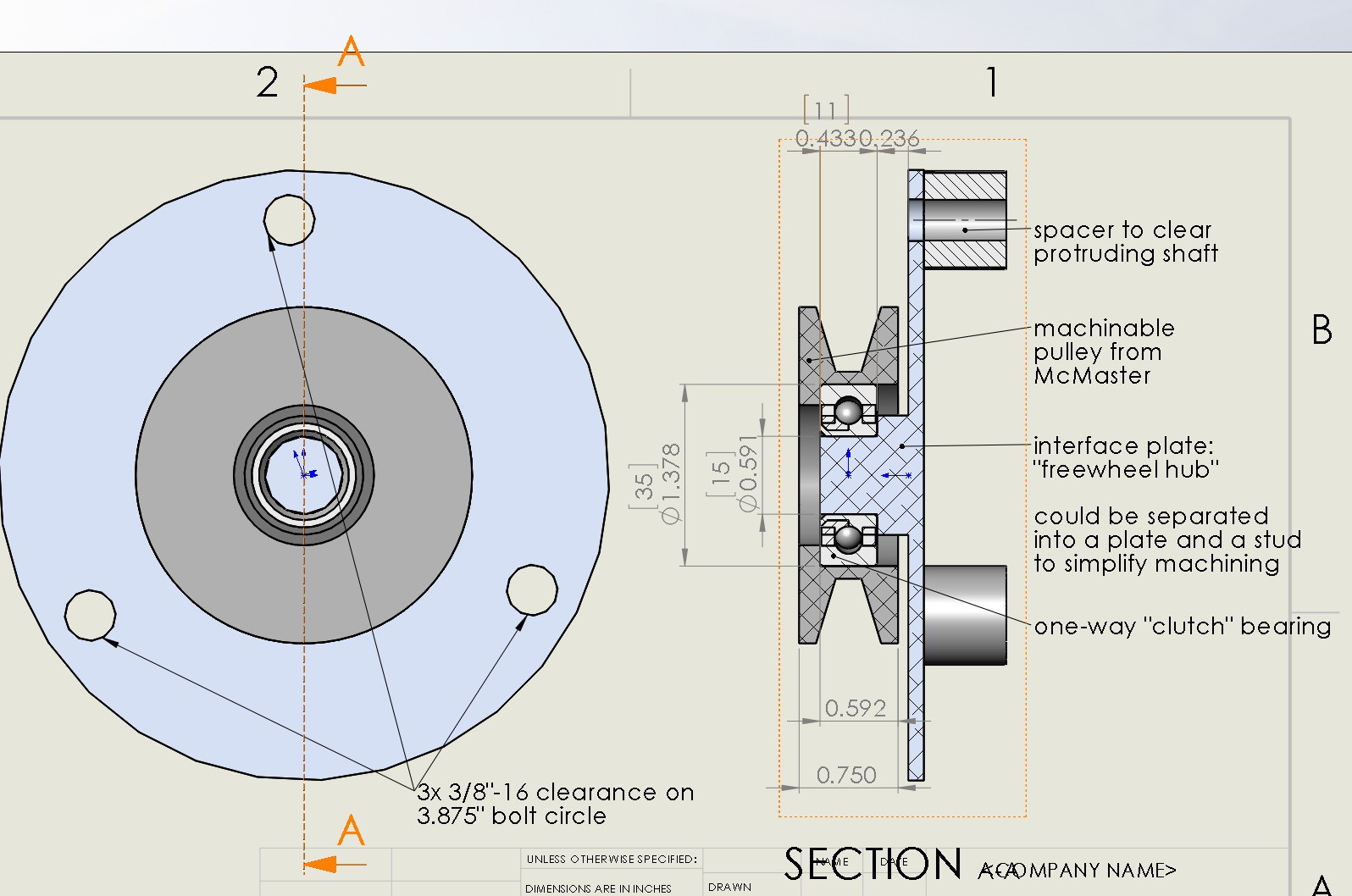
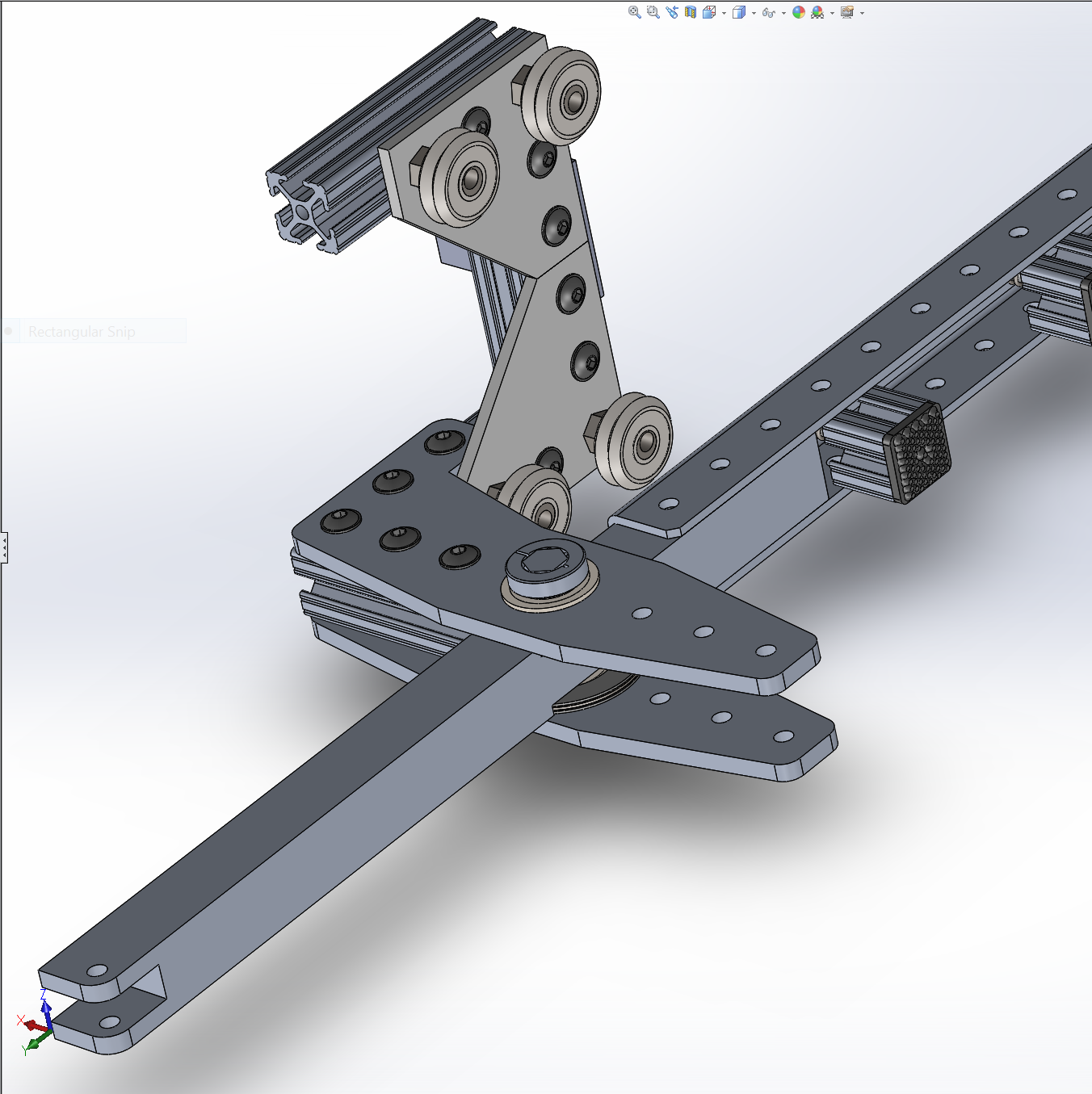
Coupling design for wheel spinner
The stackup for the wheel spinner pulley/bearing/interface plate
Wheel spinner
Test setup for spinning up hyperloop pod wheels to 6,000+ rpm for caliper brake testing. Used a pneumatic motor and a sprag clutch bearing.
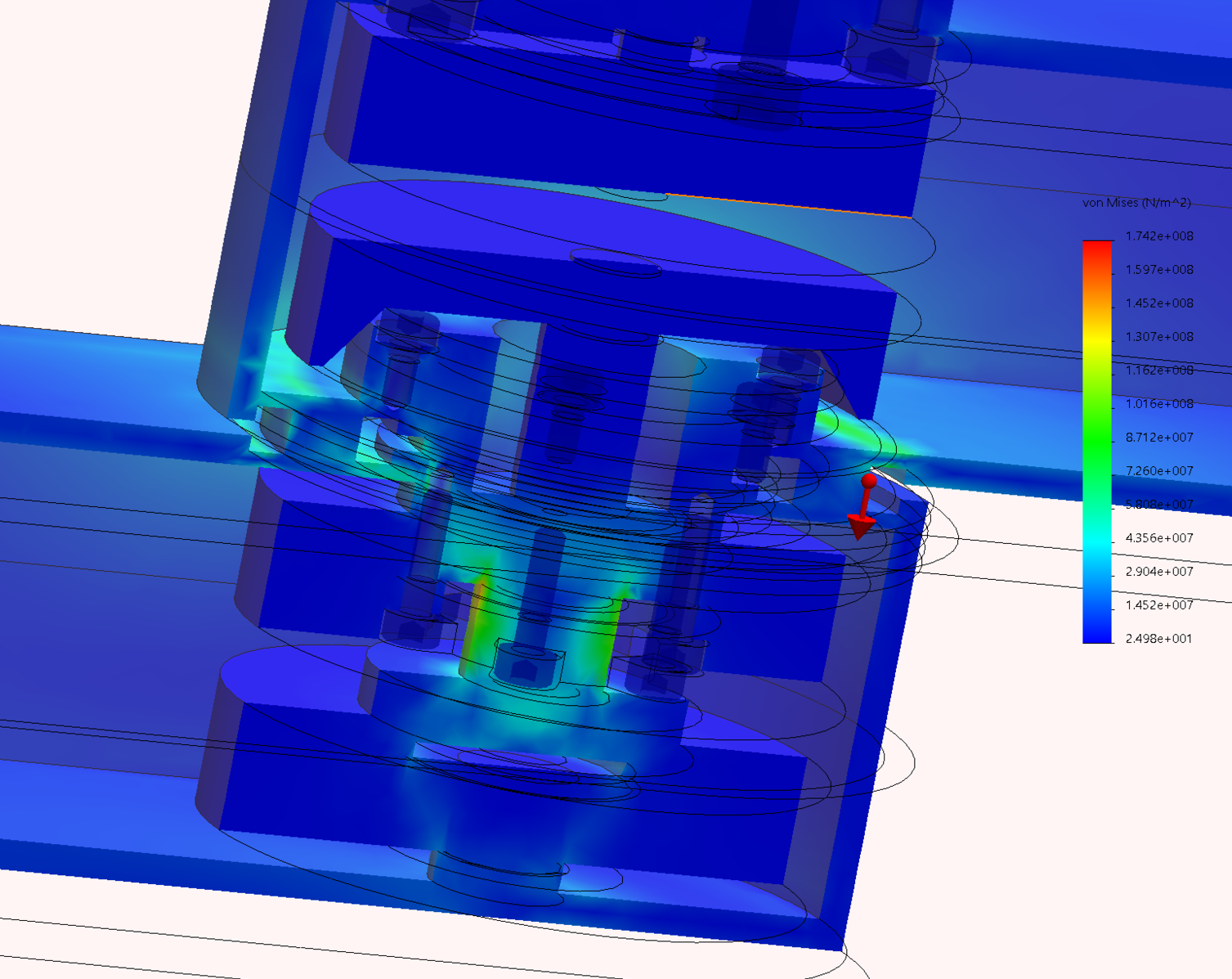
FEA of vertical manipulator loading
FEA of vertical manipulator loading on elbow with stress colormap
SCARA robot elbow
Designed with electrical passthroughs, as well as transferring the wrist rotation through concentric shafts so as to lighten the manipulator-end of the arm.
Crate-stacking robot render
From the 2015 FRC season
Crate stacking robot
This is the project I learned how to use SolidWorks through
Robot gripper joint
A joint designed with the use of needle roller thrust bearings along with roller ball bearings to accommodate a large cantilevered load on the gripper.
Also, four V-roller bearings that roll on a vertical rail for lifting items, two of which are on elliptical bushings for tension adjustment.
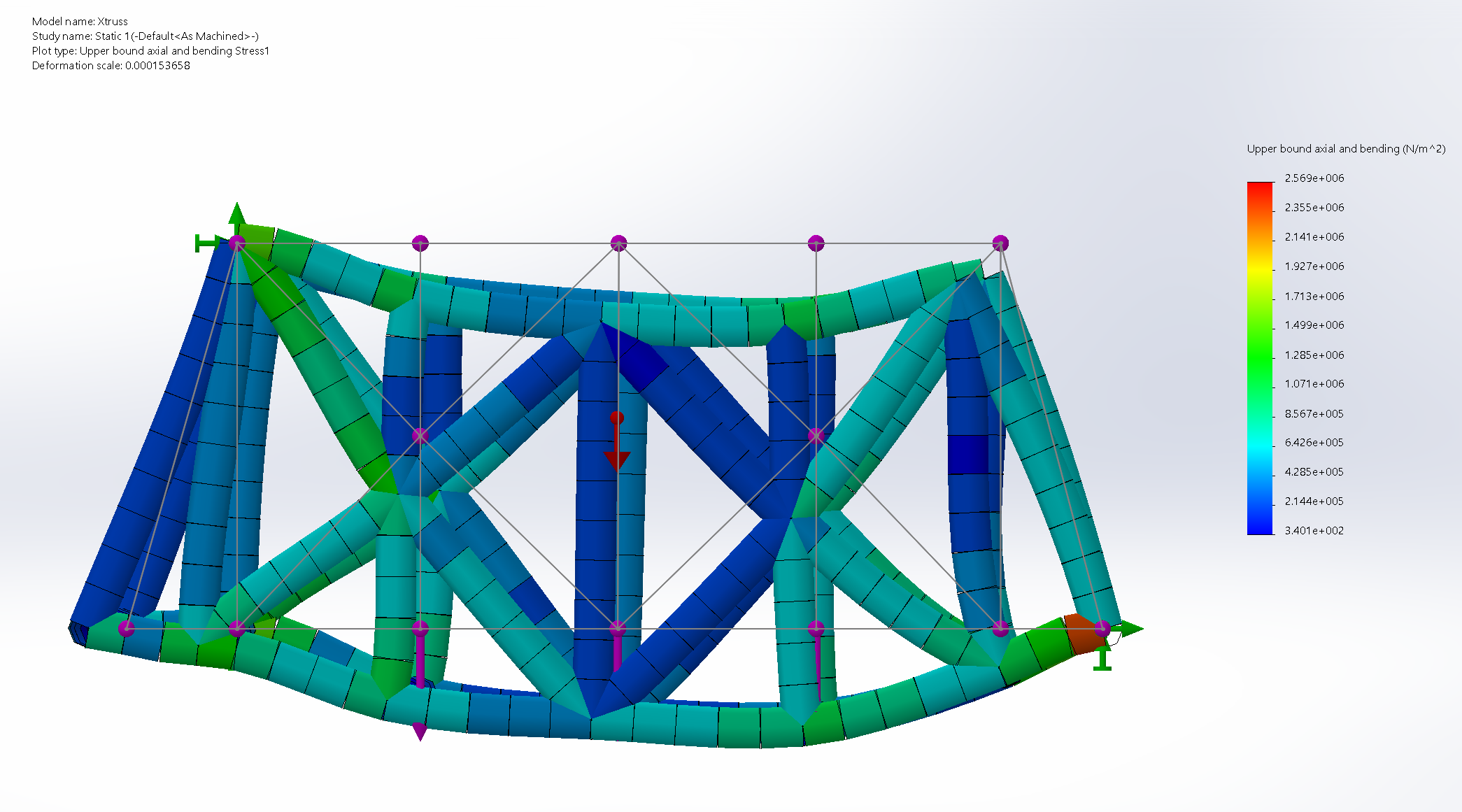
Bridge FEA
Computationally determining relative member loading and stress concentrations for a highschool project in which I built a 6-foot long recycled cardboard bridge with a team of other students for the teacher to walk across